The ev3dev Python source code for the EV3 Balancing robot and the C code for VEX IQ is now available on Github! The code is a simplified version of previously released code, leaving out unnecessary calculations, making it easier to write and tune. The plan is to release EV3-G and RobotC versions of the new...
LAVA R3X is a pretty busy robot. He got himself featured on the front cover of a book that just got published, and now he’s taking the spotlight to show that robots are keeping up with the times too I caught him red-handed taking a selfie with a rare, framed EV3 box signed by the...
One of the great things about the EV3 is that it is actually a very powerful computer. The graphical programming language developed by LEGO and National Instruments is excellent to get started with programming, but the EV3 can do much more. In fact, The LEGO Group encourages the community to unleash the full potential of...
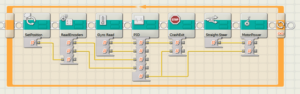
Last night I started translating my my NXT-G balancing robot program to the LEGO EV3 software, and here’s some progress. I didn’t bother building a proper robot yet, but it works! This program should also work with Gyroboy – more on that later. I’m using the HiTechnic Gyroscope for now, but I’ll add support for...
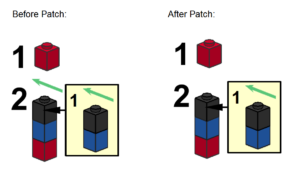
For advanced MLCAD/LDVIEW/LPUB4 users, here’s a patch that comes in useful when you make LDRAW CAD instructions for LEGO models with many arrows and sub models. If this doesn’t sound familiar to you, you won’t need this. I’d be surprised if more than 25 people on this earth used it, anyway. Download it here: GhostArrowsV1....
The experiment is now over. I blogged about a new WiFi sensor earlier. So what do you do with a Wifi sensor? The cool thing about the internet is that you can involve anyone with a computer that has internet access. So that’s where you come in. You can control my robot. From your the...
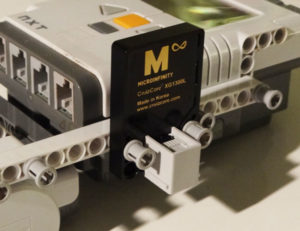
I’ve added support for the Microinfinity Cruizcore Gyroscopic sensor in my RobotC Segway driver. Check out building instructions and updated programming tutorial with new code. Here’s a video showing the new sensor in action. I’ve also made some changes to the balancing robot driver for all sensors: Changed how sensors are set up in sample...
I’ve updated my RobotC Segway drivers to version 0.97. For the full change log, see the driver file itself. The latest driver will always be at this link. In normal language, what has changed? Nothing most of you should worry about. If you replace your old “segway-driver-lv.h” with the new one in this file, you...
NXT-G won’t be the next step to singularity, but there’s still a lot you can use it for. I’ve recently been working with NXT-G to create a program for my balancing robots. I’ve done this in the past, but this time I wanted to create some clean and easy to use code that doesn’t require...
Discover LEGO MINDSTORMS EV3
Discover the many features of the EV3 set, and learn to build and program your own robots! Learn more
Start Building Robots
Website Maintenance
Robotsquare is currently being updated, which means that it may look a little different (and not very polished) for a while. All the content and pages should still be there, though. It should be back and fully operational soon.
Thanks for your patience!