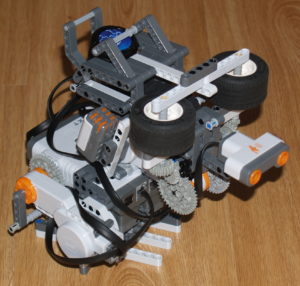
This is an update of the RCX rack-and-pinion steering car. The back wheels are driven by one motor. A motor in the front allows for steering using a rack-and-pinion steering mechanism. An ultrasonic sensor in the front detects whether the car is near a wall. If so, the car will back up and start driving...
Admittedly, the ever popular RCX chimney climber was extremely slow. To compensate, here’s a quick version that will travel the same distance in only a few seconds. Still, this robot is equally unstable as its predecessor, because of its badly placed center of gravity.
February 2007 brings you the NXTified version of the disc shooter from the RCX Ultimate Builders Set (#3800). This shooter fires discs when the robot detects any objects with its Ultrasonic Sensor or when it hears a loud sound with the Sound Sensor. The shooter wheels rotate at a different speed (see the gearing), so...
This robot arm closely resembles the arm that appears in the RIS 2.0 (RCX) set (#3804). But since the NXT set has three motors instead of only two, this design uses independent motors for grabbing and lifting. A third motor is used to rotate on its base. An ultrasonic sensor is mounted on the robot...
This is a direct copy of the walker built with the RCX, primarily built to try out the new NXT system. This build was in fact slight more difficult than the RCX design, because of the NXT motor shape. The only easy way to create two motorized shafts was to use a chain, as shown.
Discover the many features of the EV3 set, and learn to build and program your own robots! Learn more
Start Building Robots
Website Maintenance
Robotsquare is currently being updated, which means that it may look a little different (and not very polished) for a while. All the content and pages should still be there, though. It should be back and fully operational soon.
Thanks for your patience!